遥感影像获取过程通常会存在一对矛盾,即影像分辨率与幅宽,这是由传感器硬件和数据传输速率等限制因素造成的。低空间分辨率影像的幅宽较大,而高空间分辨率影像的幅宽较小。小幅宽导致高空间分辨率卫星的重复观测周期大大降低。为了克服这一问题,高空间分辨率卫星(亚米级)往往具有较好的姿态灵活性,以便通过侧摆实现对目标区域短期重访。同一观测区域的短期重访的高空间分辨率影像的观测角度不同,这必然隐含着多角度观测信息。因此,除了单景高空间分辨率影像的常规解读方法外,还需要注意挖掘多期影像提供的多角度几何信息和多角度光谱信息。
本期内容研究了基于高分二号全色立体像对数据和机载激光雷达提取的林下地形(DEM)估测森林冠层高度模型方法,对其森林高度(CHM)提取精度进行了评价,研究结果表明在林下地形已知的情况下,高分二号立体观测数据可用于森林冠层高度的估测。本文属于首次对国产卫星GF-2立体成像数据应用于CHM估测应用和定量评价研究,具有重要应用价值。
01 试验区与数据
研究区位于内蒙古自治区根河市大兴安岭林区,植被覆盖率达95%以上,森林覆盖率为73.6%。本文采用的GF-2数据,它们的空间范围分别如图1中的黄色和蓝色多边形所示,图中白色多边形所示的区域是机载激光雷达数据的覆盖范围。

图1. 高分二号数据和机载激光雷达数据空间覆盖范围(背景图为Google earth影像)
机载激光雷达数据由运-5飞机搭载莱卡ALS60小光斑激光雷达系统获取,得到0.5m分辨率的林下地形数据(DEM)和0.5m分辨率的数字表面高程模型(DSM),相减得到森林高度(CHM)。
02 试验方法
(1)采用通用成像几何模型,利用ENVI提供的立体观测数据机处理功能,以2015年6月20日的全色图像为左片,2016年7月19日的全色影像为右片,进行立体影像处理得到摄影测量点云数据。数据处理过程采用软件默认连接点数25,搜索窗口大小采用251,移动窗口采用65,最小相关系数采用0.85。
(2)密集匹配参数设置采用的最小相关系数为0.85;移动窗口大小采用默认的5×5;地面起伏状况选用的是High;地形精细程度根据图像分辨率本文采用最高的级别。
(3)最后再进行GF-2的DSM数据纠正。
03 试验结果与分析
下图(a)展示了利用GF-2核线影像合成的红蓝立体图像,图(b)为图(a)中白色方框所示位置的局部放大图。(a)的立体感觉较弱,而分辨率较高的(b)的立体感觉较强。
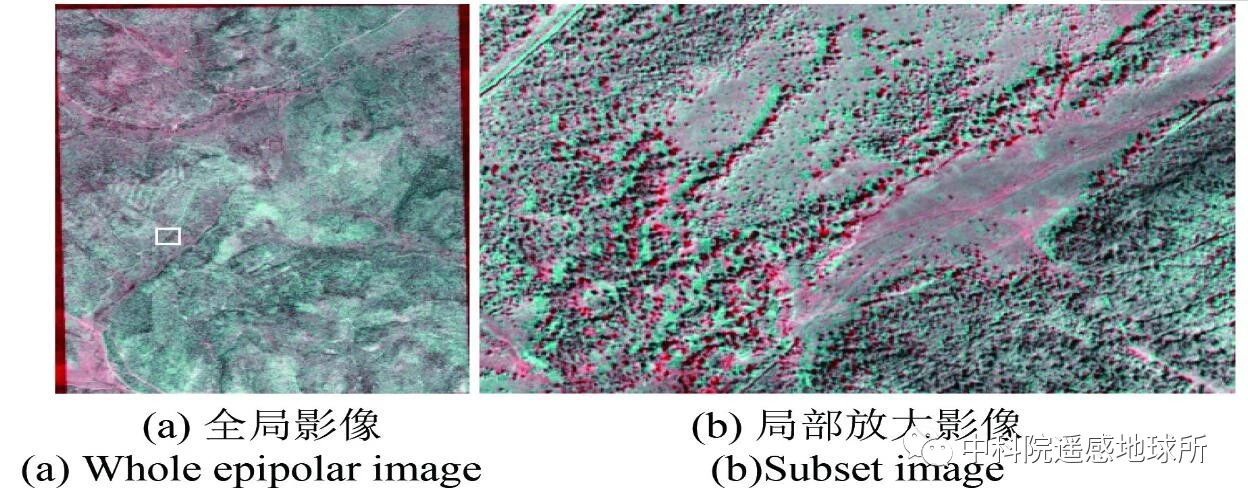
图2. 红蓝彩色合成的核线图像(红色通道为左片,蓝色和绿色通道为右片)
利用GF-2数据进行立体处理的结果得到图3。(a)为两台相机重复观测区域的左片全色影像,(b)为摄影测量点云数据栅格化成10m分辨率DSM时,每个像元内的点数图像,所得大部分像元的点云密度较高,(c)为立体处理得到的DSM,(d)左图为(c)白色矩形框覆盖区域的局部放大图,(d)右图为激光雷达得到的对应的DSM。可看出GF-2与激光雷达获取的DSM的空间格局非常相似。
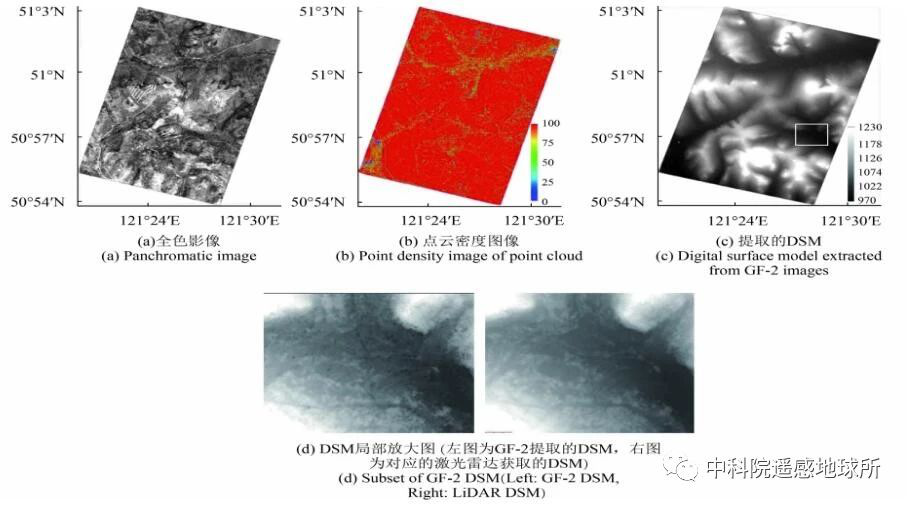
图3. GF-2立体观测数据处理结果
图4展示了GF-2的DSM与激光雷达DEM重叠区域的渲染图像,共选择了同名点18个。
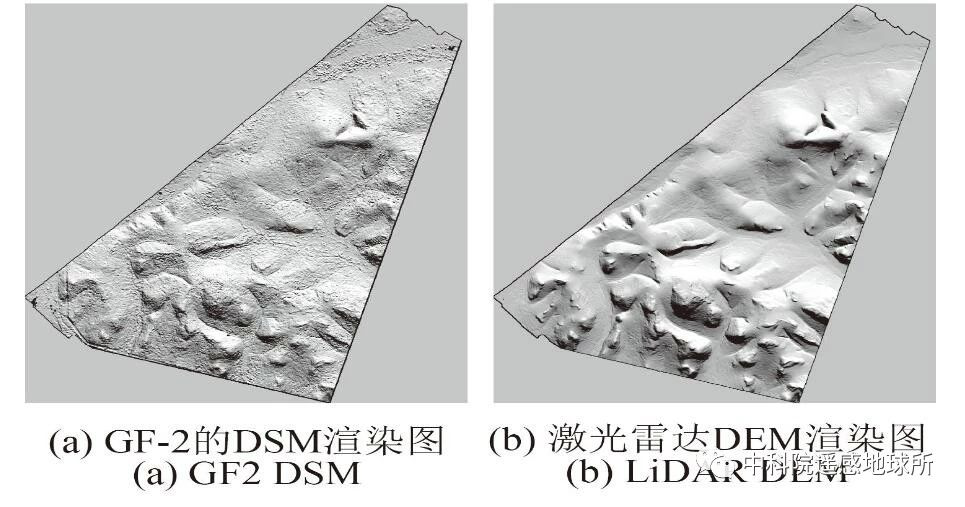
图4. GF-2的DSM与激光雷达DEM渲染图
图5以剖面线的形式展示了GF-2的DSM与激光雷达DEM高程差异,图(b)为消除高程差异后的剖面线。可看出消除高程差异后GF-2的DSM与激光雷达DSM吻合较好。
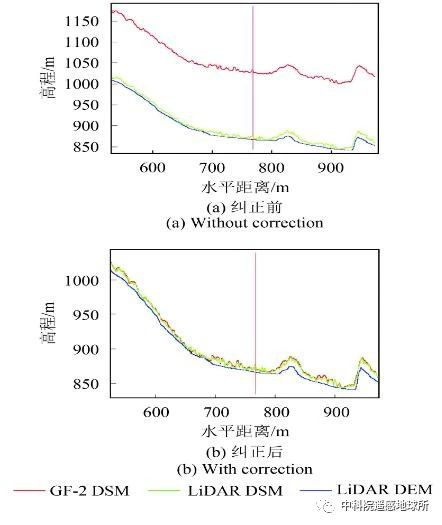
图5. GF-2的DSM与激光雷达DEM高程差异纠正前后对比
图6展示了GF-2的CHM与激光雷达CHM的对比。左图为GF-2 的DSM与激光雷达DEM相减得到的GF-2的CHM图像,中间为激光雷达CHM图像,右图为图(b)与图(a)像元对像元的散点图。GF-2的CHM与激光雷达CHM呈现明显的线性相关关系。
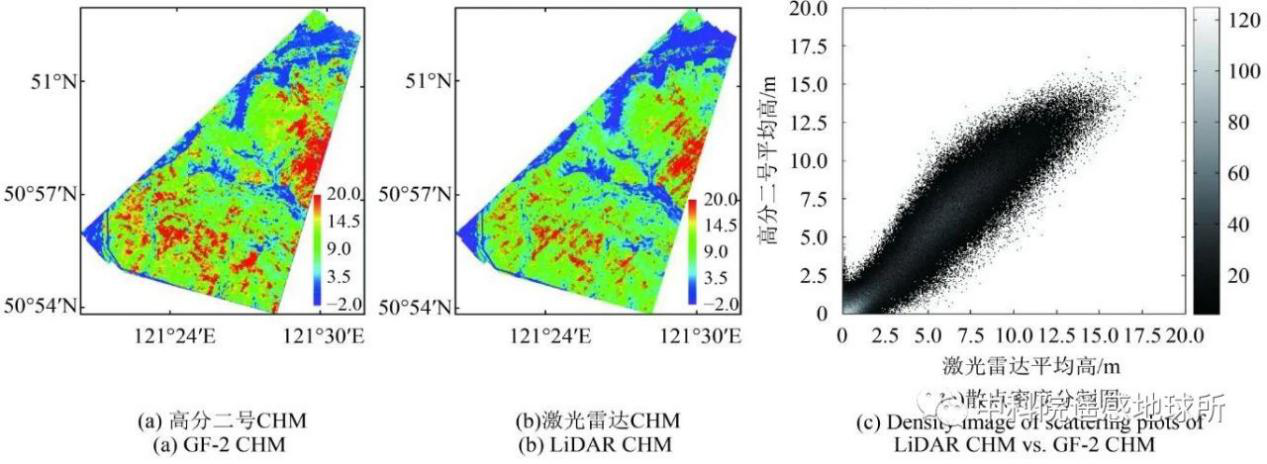
图6. GF-2的CHM与激光雷达CHM的对比
04 结 论
(1)GF-2提取的CHM与激光雷达CHM空间分布格局较为一致,两者之间存在明显的相关性。
(2)在林下地形已知的情况下,GF-2的异轨立体观测数据能较好地刻画森林冠层垂直结构信息,可用于森林高度的估算。
(3)缩短激光雷达数据与GF-2数据获取时间间隔,它们之间的相关性有可能会有所提高。
(来源:中科院遥感地球所)